
1. Introduction
Compensation for damages caused by an automobile accident has, until now, been based on the premise that the majority of accidents are caused by driver’s negligence, and a mechanism has been put in place to protect the victims of traffic accidents, mainly through the Compulsory Automobile Liability Insurance system. However, if we see more widespread use in certain situations of autonomous driving at SAE Level 3 or higher, meaning the driving system is mainly in control, accidents may occur due to system error rather than driver’s negligence. In such autonomous vehicle accidents, the problems arise of who bears responsibility for the accident and how to provide financial relief promptly to the accident victims.
There are legal issues in criminal law, civil law, and administrative law with regard to autonomous driving, but here I would like to look in particular at, within civil law, the status of debate on liability for accidents caused by autonomous vehicles. In the following, having checked the current damages system centering on Compulsory Automobile Liability Insurance, I would like to touch on future issues referring to the policies compiled by the government.
(* Please note that, as the following is a simplified explanation, some legal/technical expressions may not be accurate.)
2. Current system
-
Compulsory Automobile Liability Insurance system
After the war, with the rapidly increasing popularity of cars and the associated rapid increase in traffic accidents, there was an acute awareness of the need for a road accident damages system. In response to this need, the Act on Securing Compensation for Automobile Accidents (hereinafter “CALI Act”) was enacted and came into force in 1955, which placed liability primarily on vehicle owners etc. and established mandatory insurance in the form of Compulsory Automobile Liability Insurance (“CALI”).
-
Background of the CALI system enactment: limits of victim protection
The background to the enactment of the CALI Act was that it was difficult to promptly provide relief to victims within the framework of general civil law.
The general framework for claiming damages for an infringement on someone’s rights (“tort liability”) requires that there be “intention or negligence” on the part of the perpetrator, and the victim must prove it in order to claim damages; otherwise, the courts would be overrun with lawsuits based on false accusations and without evidence. A problem with this system was that it was unable to promptly provide relief to victims of the increasing number of traffic accident in the near future.
It was against this background, in the early days of motorization in Japan, that the CALI Act was enacted in 1955.
-
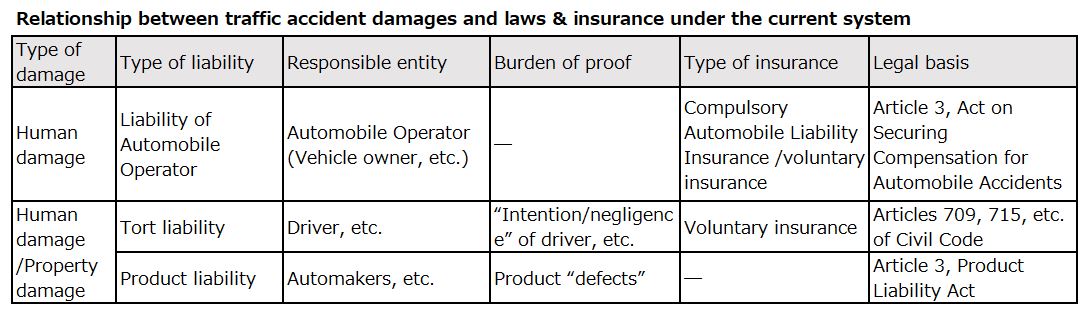
“Liability of Automobile Operator” and CALI
According to the CALI Act, the liability for personal injury caused by a traffic accident is borne by the “operator” (the person who operates the vehicle for his/her own use. In general, please assume this to be the owner of the vehicle) and the automobile operator was required to take responsibility for damages to the victim unless they could prove extremely strict disclaimer conditions (“Liability of Automobile Operator”).
This allows the accident victim to receive financial compensation by claiming damages from the owner of the vehicle, without having to prove that the accident was caused by a driver’s fault or a vehicle defect.
At the same time, the mandatory system of Compulsory Automobile Liability Insurance was introduced to secure compensation funds. In addition, the death benefit under the CALI system is 30 million yen, and any portion exceeding this is covered by voluntary insurance or the operator’s own funds.
*Prepared by the author with reference to “Autonomous Driving and Social Change – Law and Insurance”, Shoji Homu, published in 2019 under the supervision of the Meiji University’s Institute of Autonomous Driving.
3. Keeping pace with the age of autonomous driving
The government has released the Regulation Development Guidelines for Autonomous Driving, which suppose the problem of a transition period during which autonomous vehicles mix with conventional vehicles. Here, we can see the future direction of the legal system, including matters related to the aforementioned CALI Act. Although many aspects of the legal handling of autonomous driving accidents will take shape in the future, the following will discuss the issues raised in the regulation development guidelines and the recent situation.
① “Liability of Automobile Operator” maintained
The regulation development guidelines indicated a direction of maintaining the above-mentioned “Liability of Automobile Operator” framework with regard to autonomous driving.
In other words, even if the system is mainly in control for Level 3 or 4 autonomous driving, the operator will remain, as before, primarily responsible for the damages caused by an accident. In addition, if the accident is due to a defect in the autonomous driving system, the operator or the insurance company that paid out insurance to the operator will make a claim for compensation to the automaker in accordance with the Product Liability Act (PL Act).
② Ensuring the effectiveness of compensation claims to manufacturers, etc.
When an insurance company is seeking compensation for damages from an automobile manufacturer, it must first identify that the accident occurred while the autonomous system was driving, and then prove that the autonomous vehicle or its system were defective. But this is not always easy.
The regulation development guidelines state, “We should consider how to create a mechanism to ensure that insurance companies remain able to effectively exercise their right to file for reimbursement from automobile manufacturers.”
In addition, the previously released report by Ministry of Land, Infrastructure, Transport and Tourism (“MLIT”) stated that, as an example of specific measures, insurers can use recall information as a reference when filing a claim for reimbursement. In addition, the report stated that the MLIT and other relevant ministries, agencies and organizations will collaborate on such points as:
- improvement of the environment for installing and utilizing EDRs (automotive device for recording accident data);
- creation of a cooperative structure for smoothing reimbursement claims between insurance companies, automakers, etc.; and
- development of a system for investigating the causes of accidents and studying the safety of autonomous driving systems.
③ Problems related to hacking
In system-driven autonomous vehicles, it is conceivable that accidents can occur due to hacking of the system. In this case, the vehicle owner can no longer be assumed to have liability as the automobile operator. (Conventionally, in the event of an accident caused by a stolen vehicle, the original owner of the vehicle is assumed to not be liable as the operator, and this can be considered in the same way.)
Therefore, in accordance with the regulation development guidelines, it would be appropriate to deal with the victim of an accident involving a hacked autonomous car through the government’s guarantee program. (This mechanism is similar to the current example in the case of stolen vehicles.) However, this is not the case if the vehicle owner has neglected to take the necessary security measures.
④ Problems related to software and updates
What about liability for defects in the software built into autonomous cars? According to the regulation development guidelines, car manufacturers bear the responsibility for product liability under the PL Act, even for a software defect, as long as it is also regarded as a defect of the autonomous vehicle. In this case, the software developer may be separately held liable for tort liability.
On the other hand, the software is expected to be updated from time to time after the vehicle is sold and delivered to a consumer. Under the regulation development guidelines, judgement on whether or not there is a “defect” under the PL Act is determined, as before, based on the product’s “time of delivery”, and the question of updates is a matter for continued study.
As a related trend in administrative law, in May 2019 the revised Road Transport Vehicle Law was enacted, and a government licensing system was introduced for software updates to autonomous driving systems. There is now a public framework for ensuring the safety of software updates.
In addition, the MLIT report mentioned above stated that a new duty of care for automobile operators, such as vehicle owners, could possibly be to appropriately update software and data. It is possible that appropriate software updates may become a duty not only for the manufacturers but also for vehicle owners.
[References]
Strategic Headquarters for the Promotion of an Advanced Information and Telecommunications Network Society / Strategic Conference for the Advancement of Public and Private Sector Data Utilization “Regulation Development Guidelines for Autonomous Driving” 2018
Ministry of Land, Infrastructure, Transport and Tourism: “Report on Liability Related to Autonomous Driving by the Research Panel”, Summary version/Full version, 2018
Ministry of Land, Infrastructure, Transport and Tourism: “Report by the Council of Transport Policy, Land Transport Committee/Automotive Subcommittee, Regulation Development Committee on Advanced Technologies such as Autonomous Driving: How to Implement a Regulation for Ensuring Vehicle Safety in Response to Advanced Technologies such as Autonomous Driving,” 2019
Ministry of Land, Infrastructure, Transport and Tourism press release: “Cabinet decision on ‘A bill to partially revise the Road Transport Vehicle Law’,” March 8, 2019
Daily Automotive News: “Development of Type Authentication Method for Autonomous Driving Cars: The Government is to Balance Safety and Efficiency” February 18, 2020
Koji Nakayama, Mariko Nakabayashi, Eiji Yanagawa, Shoichi Shibayama, Supervised by the Meiji University’s Institute of Autonomous Driving, “Autonomous Driving and Social Change – Law and Insurance,” 2019, Shoji Homu
Edited and written by Seio Nakajima, Takehide Takahashi and Hideo Kobayashi, “Current Status and Issues of Autonomous Driving,” 2018, Shakaihyoronsha Co., Ltd.
Edited by Yutaka Fujita, “Autonomous Driving and the Law,” 2018, Yuhikaku Publishing











